基于上一条博文《SVPWM 三相逆变器电压空间矢量调制 初入门》的基础上,我们知道:MPC 优化问题可以简化和降低对系统行为的预测,只对可能的7 种开关状态进行预测,通过目标函数的计算和比较,选择最优开关状态。该方法被称为有限集模型预测控制(FCS-MPC)。 FCS-MPC 预测每个有效开关状态下的负载电流,根据测得的负载电流预测负载电压。预测的依据是在每个采样周期结束时使电流预测值与参考值之间保持最小误差,即代价函数最小原则。但是FCS—MPC控制过程中在线计算量比较大,会导致系统控制延迟。
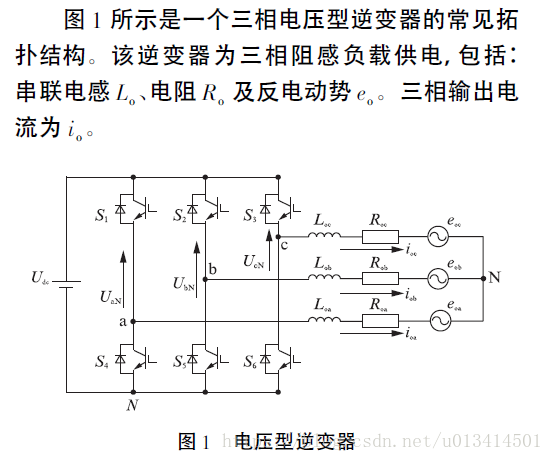
该模型为了尽可能的模型实际情况,选用阻感负载。其逆变器模型见下图所示:
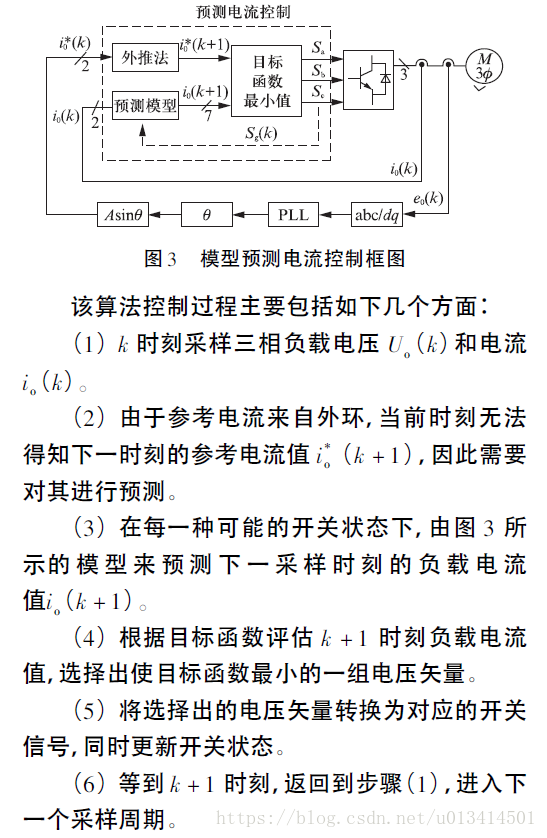
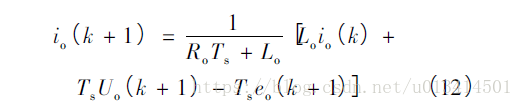
由之前的博文知: 其模型预测电流的控制框图如下所示: 因为反电动势的周期远小于采样周期,故:
采用iα,iβ可以实现电流i状态解耦,类似于凸级同步电机的d轴与q轴。
补偿的方法如下图所示:
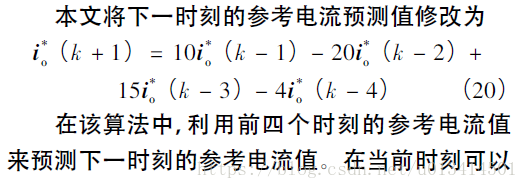
最后总结一下:即在k时刻,通过不同的输入量U(k+1)预测k+1时刻的电流值,并且在k~k+1这一个采样周期中,通过最小化代价函数计算k+1时刻的输入量U(k+1),故到了k+1时刻输入U(k+1),就可以得到预估的i(k+1)。于是这个计算时间就有了补偿。那么这个k+1时刻的参考输入电流值是如何预测的呢?是根据k时刻的前四个时刻的参考输入电流值来预测的,见式(20)。
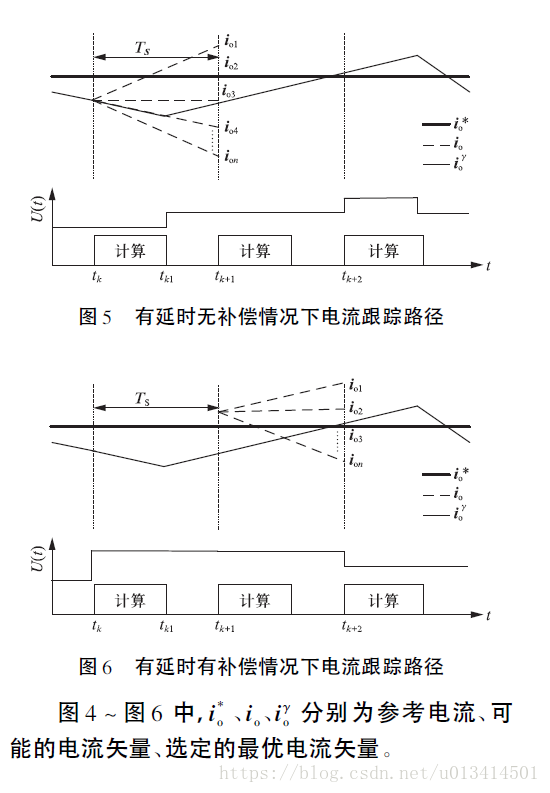
根据式(10)形式的不同,我们还有另外一种形式: U(K)=Ri(k+1)+L*( i(k)-i(k-1) )/T +e(k) 即与R相乘的i(k)变为i(k+1)。那么式(12)将变为: 我们在这种形式下采取的策略是:在k时刻预测k+1时刻的电流值,然后用k+1时刻的电流值预测k+2时刻的电流值,故总的来说,是在k时刻预测k+2时刻的电流值,然后根据最小化代价函数的原则,计算出输入值U(k+1),然后在k+1的时候输入在前一个周期已经算好的计算值U(k+1),根据下张图片,使k+2时刻的预测电流值能达到参考电流值。 总结来说:在k时刻: (1) 测量i(k) (2) 输入在k-1 ~k时刻计算好的U(k) (3) 根据式(2)预测i(k+1) (4) 根据输入不同的u(k+1),依据式(3)预测i(k+2) (5) 用上一步中不同的i(k+2),输入到代价函数计算哪一个值最小, (6) 选定第4步选定的i(k+2),得到相应的U(k+1),在第k+1步输入
之所以会出现两种不同的方法,其本质在于预测模型的不同。在第一种方法中: 根据这个预测模型,我们知道一输入U(k+1),就能得到i(k+1)。
在第二种方法中: 在这个预测模型中,输入U(K)只能得到i(k+1),即输入U(K+1)得到的是i(k+2),而不是第一个预测模型的i(k+1),这也就导致了要是i(k+2)等于i*(k+2),我们要在k+1时刻输入U(k+1),不同于第一个模型在k+1时刻输入U(K+1)就可以令i(k+1)=i*(k+1)。












 京公网安备 11010802041100号
京公网安备 11010802041100号