作者:历史本轻狂 | 来源:互联网 | 2023-08-26 18:28
大创四足机器人
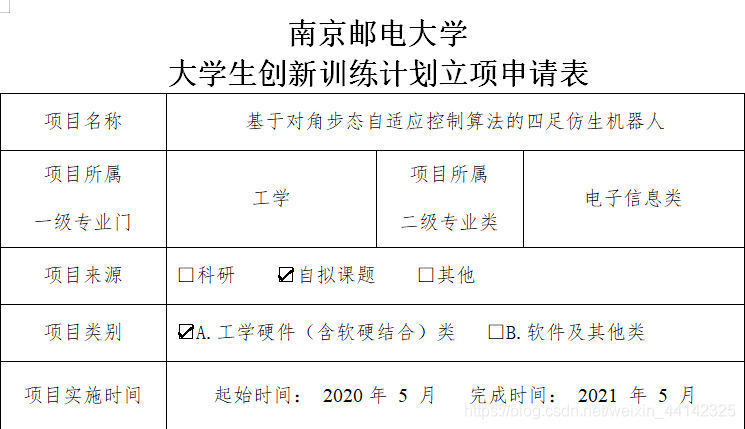
在学校的大创立项中,我们跨院找了电院的一位院长,人很好也很热心,最后敲定了选择了仿波士顿大狗的课题,在没有前人栽树的背景下,只能自己造轮子给后人乘凉了(此处应有狗头哈哈哈)。查阅资料中,除了民间大佬各类“手艺人”的视频外。,哈工大的一个实验室在B站上传的教学和记录视频给了很多启发,真心佩服,哈工大在RoboMaster等系列比赛中真的很强,自控所掌握的技术资源都很值得学习。我们后续可能会借鉴,再加以自己的创造。
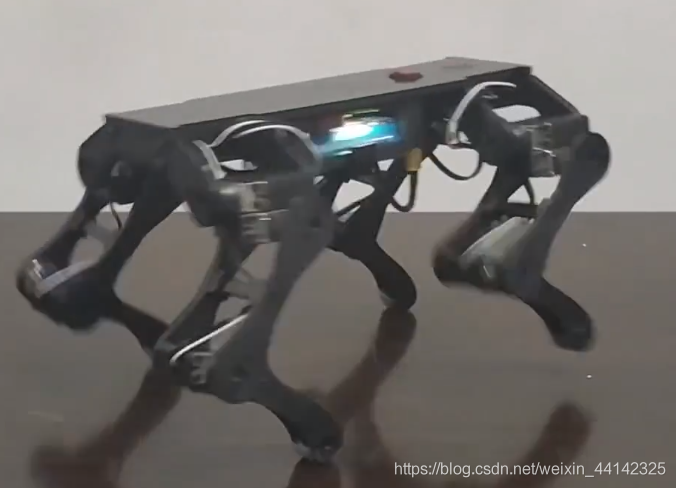
From: 哈工大团队的试验机器狗
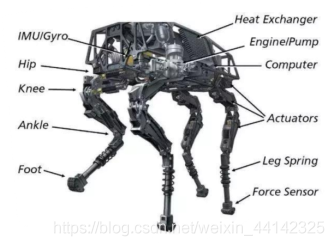
From: 波士顿的军事机器狗
(来自南邮大二的菜鸡博主,校科协的讲师一枚,飘过~)
前期准备
做自控的基本准备
- 一台能用的至少能写代码的笔记本
- 锂电池(也可以用爱发电)
- 系列模块(降压模块,stm32f1,驱动模块,杜邦线,oled)
(模块后续会用PCB板代替,提高性能,压缩空间) - 十二个舵机,此处选用飞特串行总线舵机
- 3D打印的耗材(队友会用SolidWorks去打印机器人的机身)
- 树莓派和显示屏(一个队友负责写视觉,为了效率放树莓派上处理)

飞特串行总线舵机
哈工大的一个机器狗趣味展示
- 之前其实是和队友做过工程训练车,机器臂,电磁炮这些,参与过一些比赛,19TI杯这些,但是四足机器人没有接触过,前期打算以模仿移植为主,先做出实验模型再进行大狗的制作,毕竟成本也是个问题(捂脸苦笑)。看了一下姿态算法还有机械结构都不简单,希望边学习边提升。
- 人生中第一次写博客,更多是试水学习,请多多包涵。
- 写博客的初衷其实更多是想提交进度,作为见证,督促自己学习,毕竟疫情让人颓废哈哈哈哈。
- 如有建议感谢提出(虽然都不一定会有人看哈哈哈哈)。



![[网页设计]新手做 网站 必备 软件。及 下载 地址~~~~(06年10月10日修订)](https://img.php1.cn/3cd4a/1eebe/cd5/dc7ef30f57b727c7.jpeg)

 京公网安备 11010802041100号
京公网安备 11010802041100号